RT-Thread实验
RT-Thread
RT-Thread简介
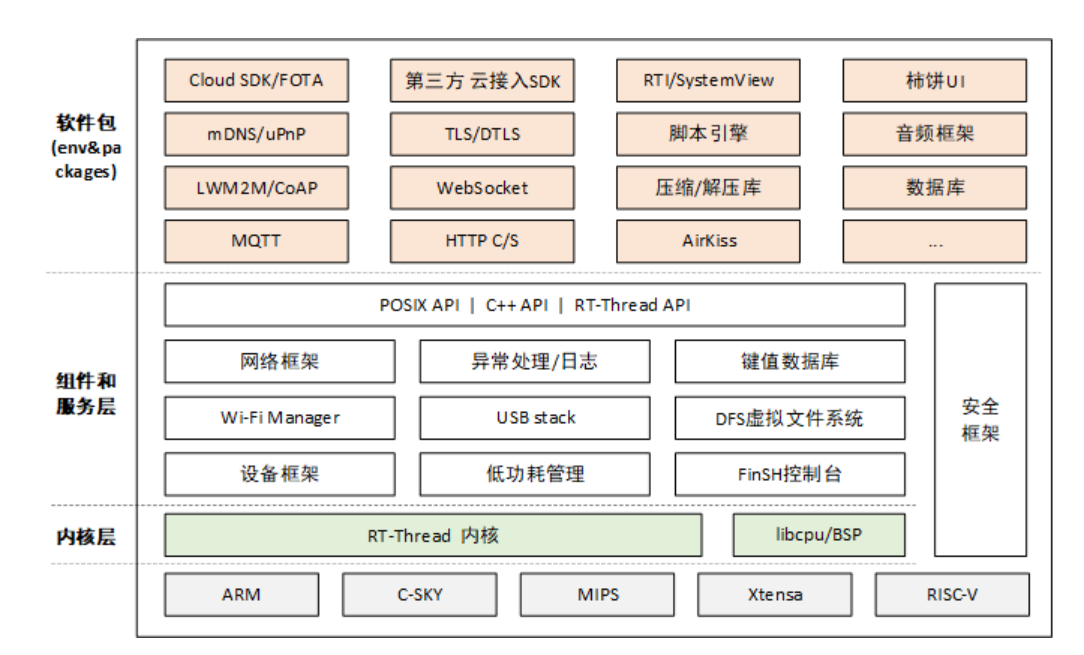
RT-Thread(下文简称rtt)是一款纯国产的RTOS,其特色在于组件非常丰富,适用于物联网行业。其基本组件包含RTOS内核,wifi协议栈,dfs文件系统,finsh控制台,USB协议栈,安全模块,低功耗模块,音视频框架,压缩解压库等
rtt主要运行于32位cpu,但更高等级的cpu也可适用
环境搭建
目前我们需要env工具使用menuconfig来进行组件裁剪甚至内核裁剪,在调试的时候我们还需要用到segger公司的systemview工具来查看资源占用,线程调度等具体信息。在工程代码管理方面,我们采用git从rtt官方库中拉取代码来进行版本管理,使用vscode进行代码编辑,使用keil进行代码烧写,使用scon脚本编译代码,使用MobaXterm进行串口调试和执行shell命令。我们暂时不需要MQTT或者websocket等高级功能,但未来可能进行补充,因此我们暂时性的只介绍我们使用到的工具
git环境配置及项目搭建
首先建立工程需要将代码克隆到本地
git clone git@github.com:RT-Thread/rt-thread.git
此操作将会在当前目录下建立一个.git文件夹和一个rt-thread文件夹
如果克隆时遇到了公钥指纹的问题,可以尝试重新登陆
git config --global user.name "用户名"
git config --global user.email "邮箱"
克隆成功后我们得到的是master版本,master更新频繁因此适合尝鲜的发烧友使用。而研究学习以及做产品建议使用stable或者lts版本,为了能够下载多个版本我们还需要执行以下命令
git branch -r //获取远程仓库分支名
git checkout -b 本地分支名 origin/远程分支名 //将远程分支下载到本地分支
//例如我们如果要下载origin/lts-v4.1.x版本的rtt,我们可以执行以下命令
git checkout -b lts-v4.1.x origin/lts-v4.1.x
这样我们就将远程的lts-v4.1.x分支拉取到本地的lts-v4.1.x分支,即使本地之前没有创建lts-v4.1.x分支也无所谓,git会自动创建
下面是下载好的分支

由于v3.1.x不能生成packages文件夹,v5.0.x不能menuconfig,因此之后我们统一在lts-v4.1.x版本上对代码进行更改
至此本地仓库搭建完毕
env环境搭建
Env 是 RT-Thread 推出的开发辅助工具,针对基于 RT-Thread 操作系统的项目工程,提供编译构建环境、图形化系统配置及软件包管理功能。我们使用env最主要的目的就是menuconfig套件,其次env有方便易用的命令行系统。menuconfig是linux和rtt都使用用来配置内核模块的工具。我们可以通过menuconfig图形化系统来配置内核及模块,这样就不必到每个文件夹下修改Kconfig的内容了,十分方便
首先从官网下载env工具包并安装,而后在对应的bsp目录下D:\Programes\RT-Thread\rtt\rt-thread\bsp\stm32\stm32f103-blue-pill打开env命令行,并使用menuconfig命令来配置软件包
D:\Programes\RT-Thread\rtt\rt-thread\bsp\stm32\stm32f103-blue-pill
menuconfig
这里我们只选择 RT-Thread online packages-> tools packages-> SystemView 工具用来配合systemview软件使用。由于我们使用的是在线软件包,因此在选择之后我们还需要去服务器上下载,这一步使用pkgs --update命令
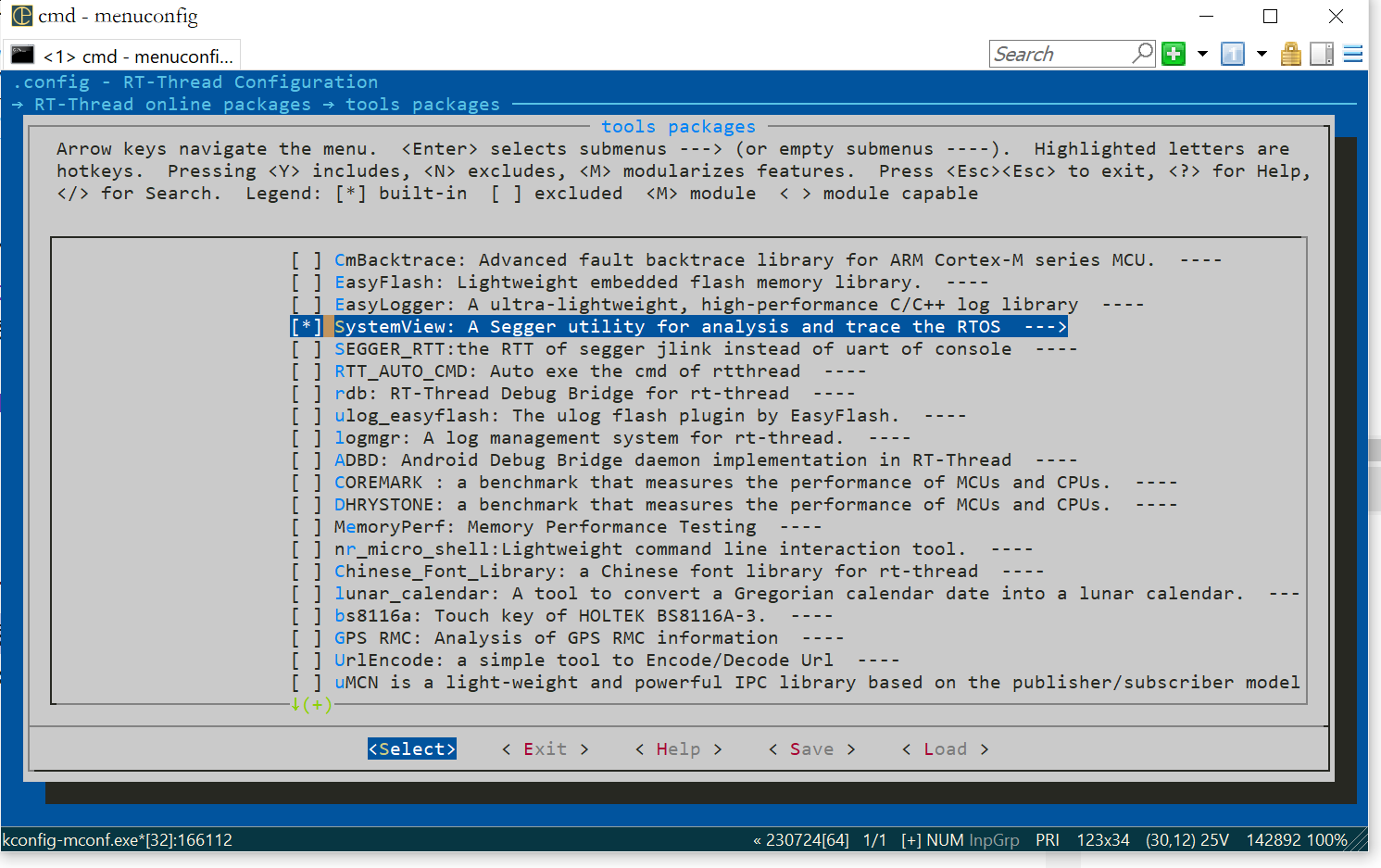
空格键就可以选中,?键可以查看帮助
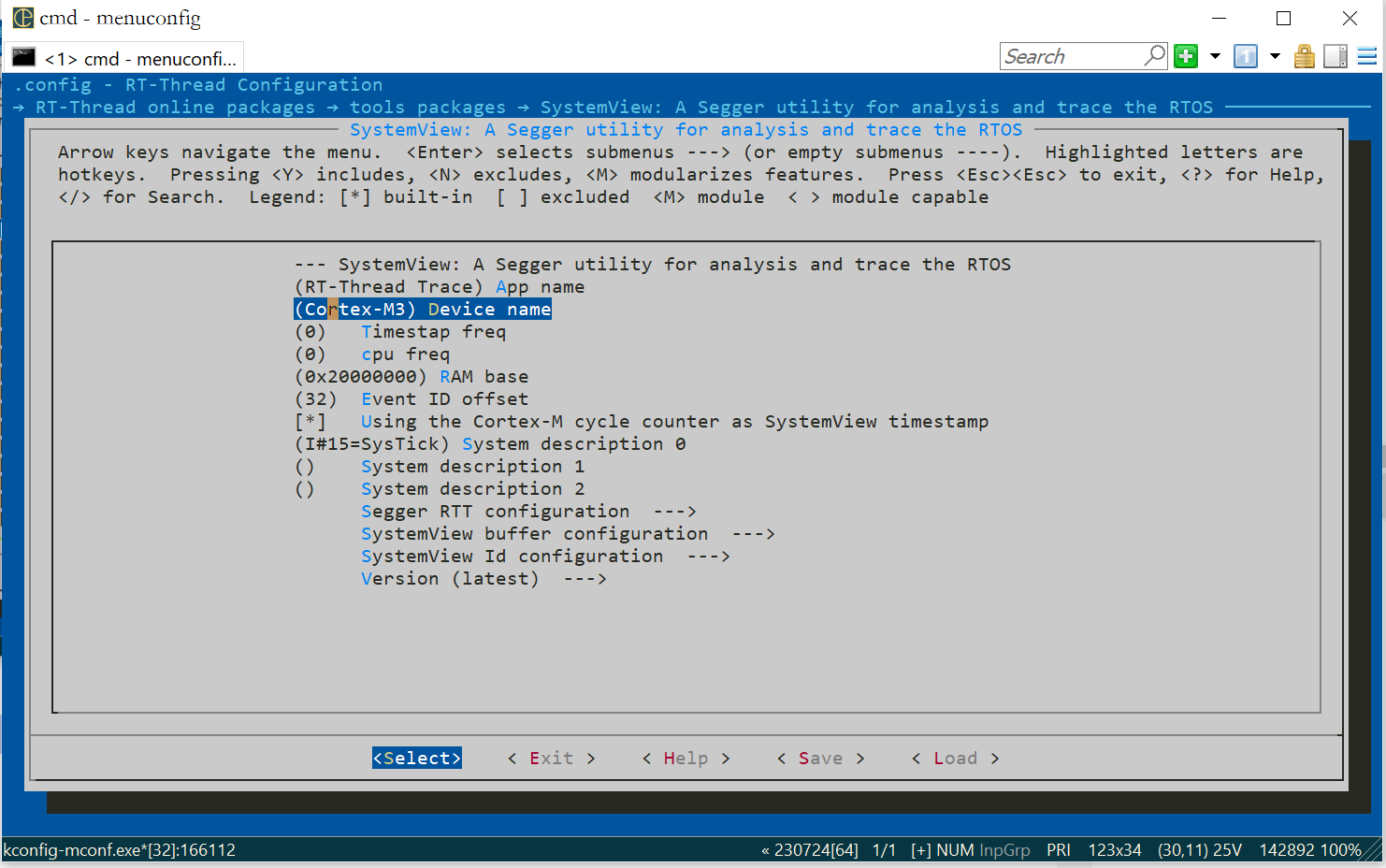
进入到SystemView后我们还需要设置内核为M3
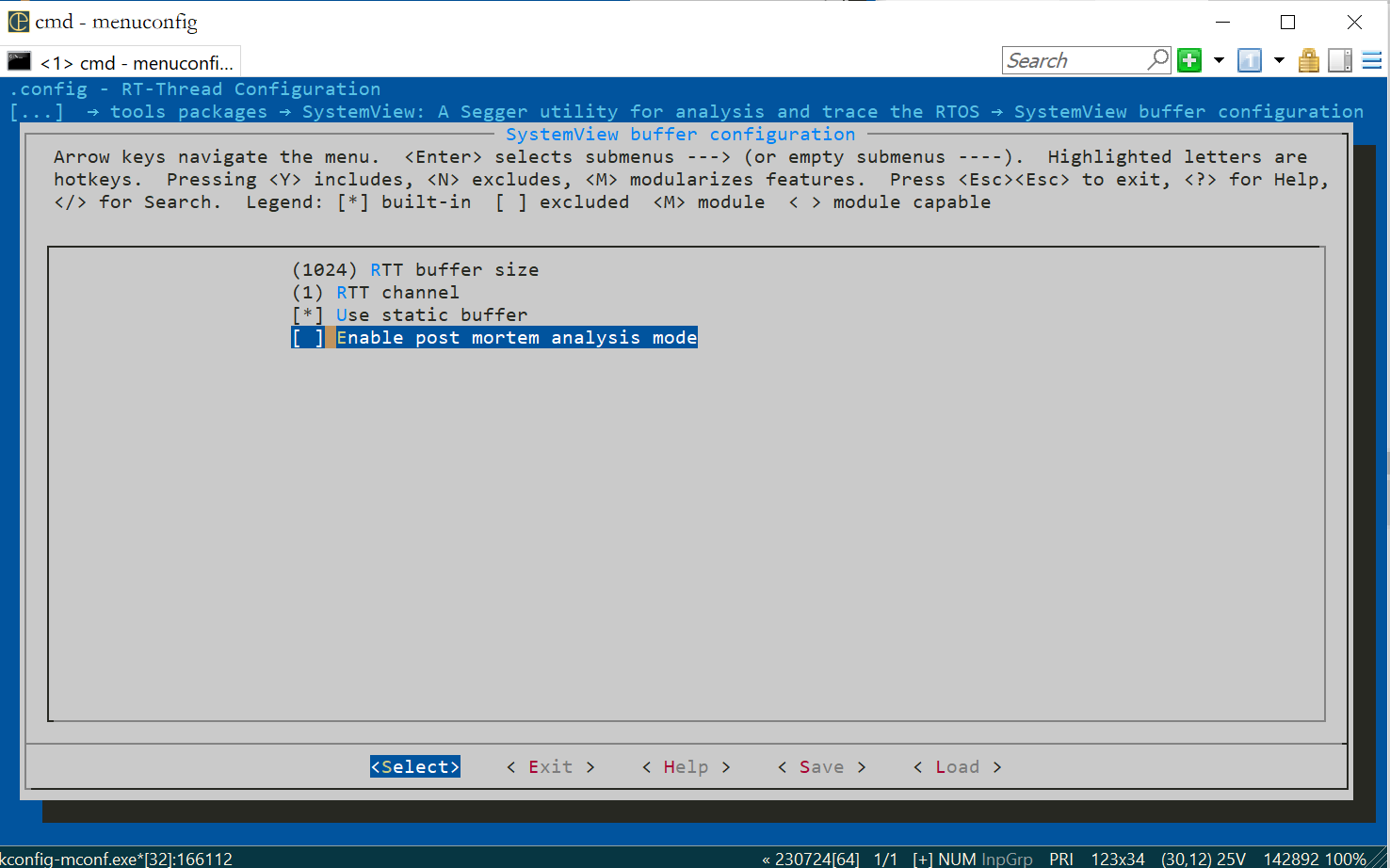
并在SystemView buffer configuration中关闭事后分析模式
配置完成后退出保存即可
不要忘了在最后还要获取更新包,pkgs是rtt官方维护的包管理工具
pkgs --update
更新包下载后还需要把他们编译进代码,我们使用基于python的编译脚本scons进行编译。在bsp目录下执行
scons
这样我们就得到了软件包文件夹packages。由于systemview并不能识别rtt系统,我们需要将packages\segger_debug-xxx\SystemView_Description\SYSVIEW_RT-Thread.txt文件拷贝到SystemView 工具安装目录下的 Description 目录下
:::alert-info
在v5.0.x版本中shiysystemview模块时会产生rtt版本过高的问题
:::
为了支持keil等工具,我们还需要执行
scons --target=mdk5
之后我们就可以在bsp目录下找到project.uvprojx文件了。我们只需要打开keil编译并进行进行烧录即可
vscode项目搭建
为了保证编译与编辑的一致性,因此vscode与keil的项目文件应保持一致。我们在vscode的插件市场搜索project manager,然后将rt-thread文件夹导入,这样在编辑代码时我们就可以保诚代码的一致性,这里我没有安装git插件,因此代码的版本管理还需要我们手动进行
为了能够测试systemview,我们还需要在工程内添加测试代码,测试代码源于rtt文档中心
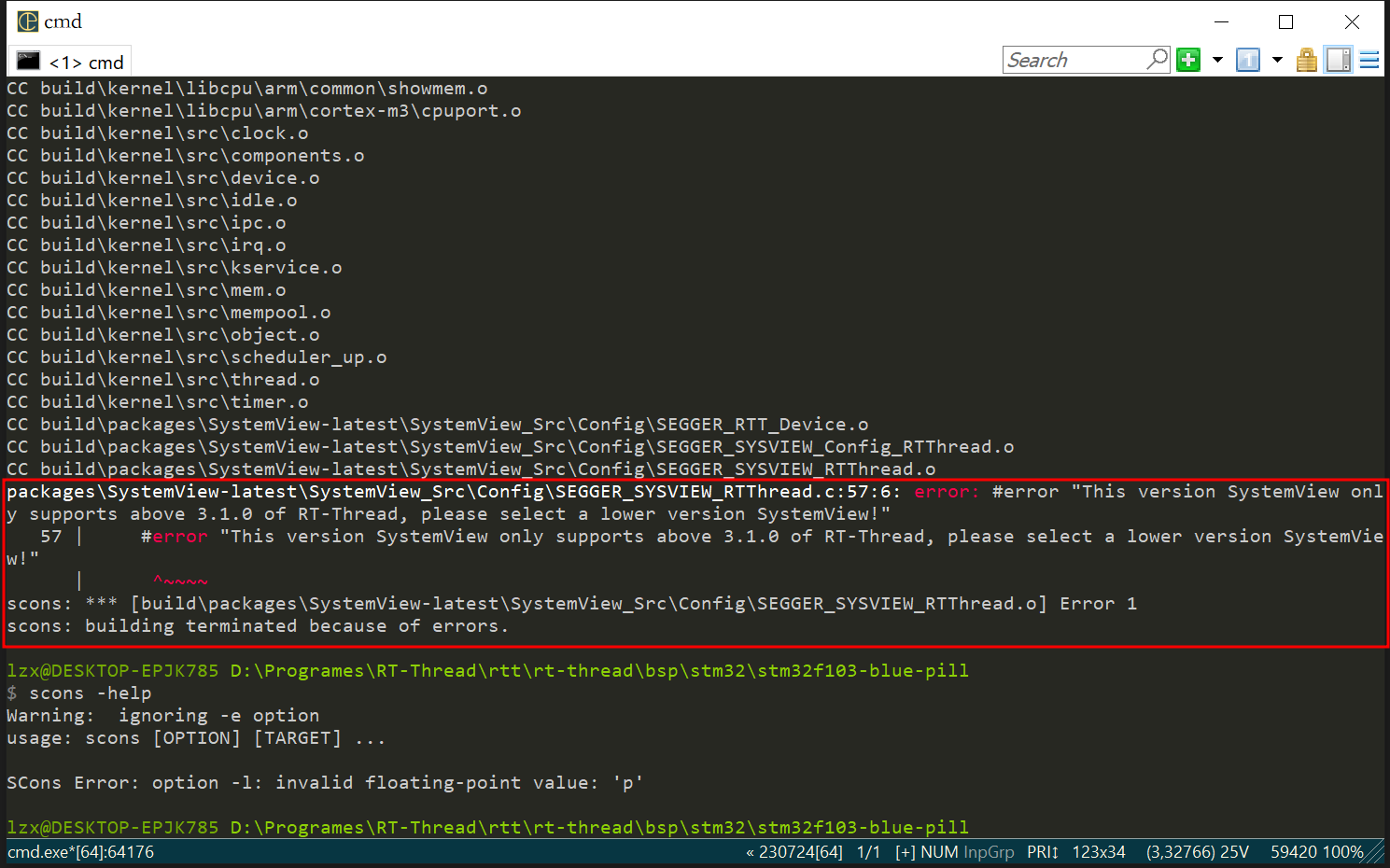
添加后我们还需要重新编译模块,但是执行scons命令后会出现如图所示的错误信息
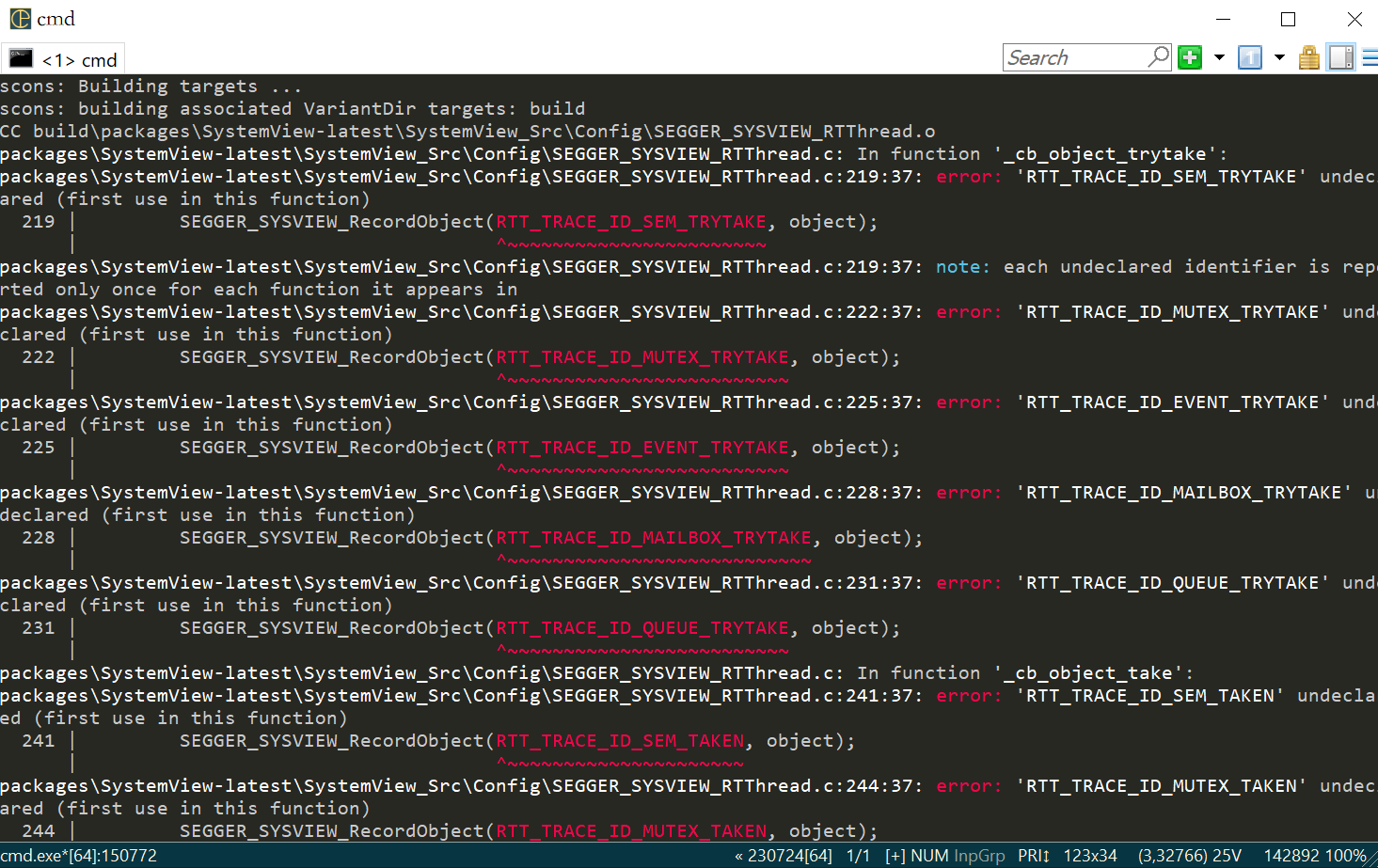
根据提示,原因可能是packages\SystemView-latest\SystemView_Src\Config\SEGGER_SYSVIEW_RTThread.c文件中的若干变量未定义,我们可以找到对应未定义变量的定义文件如图
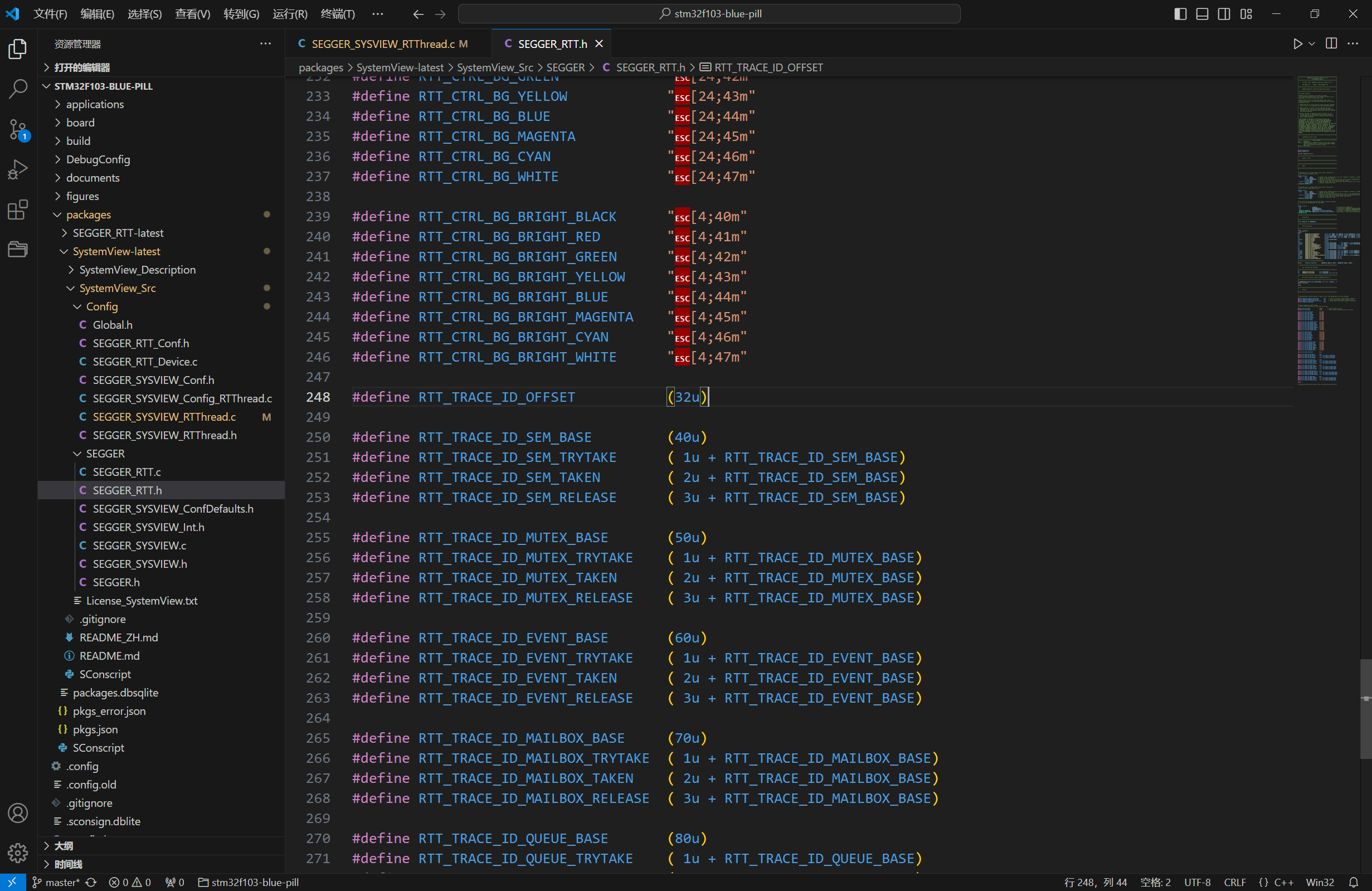
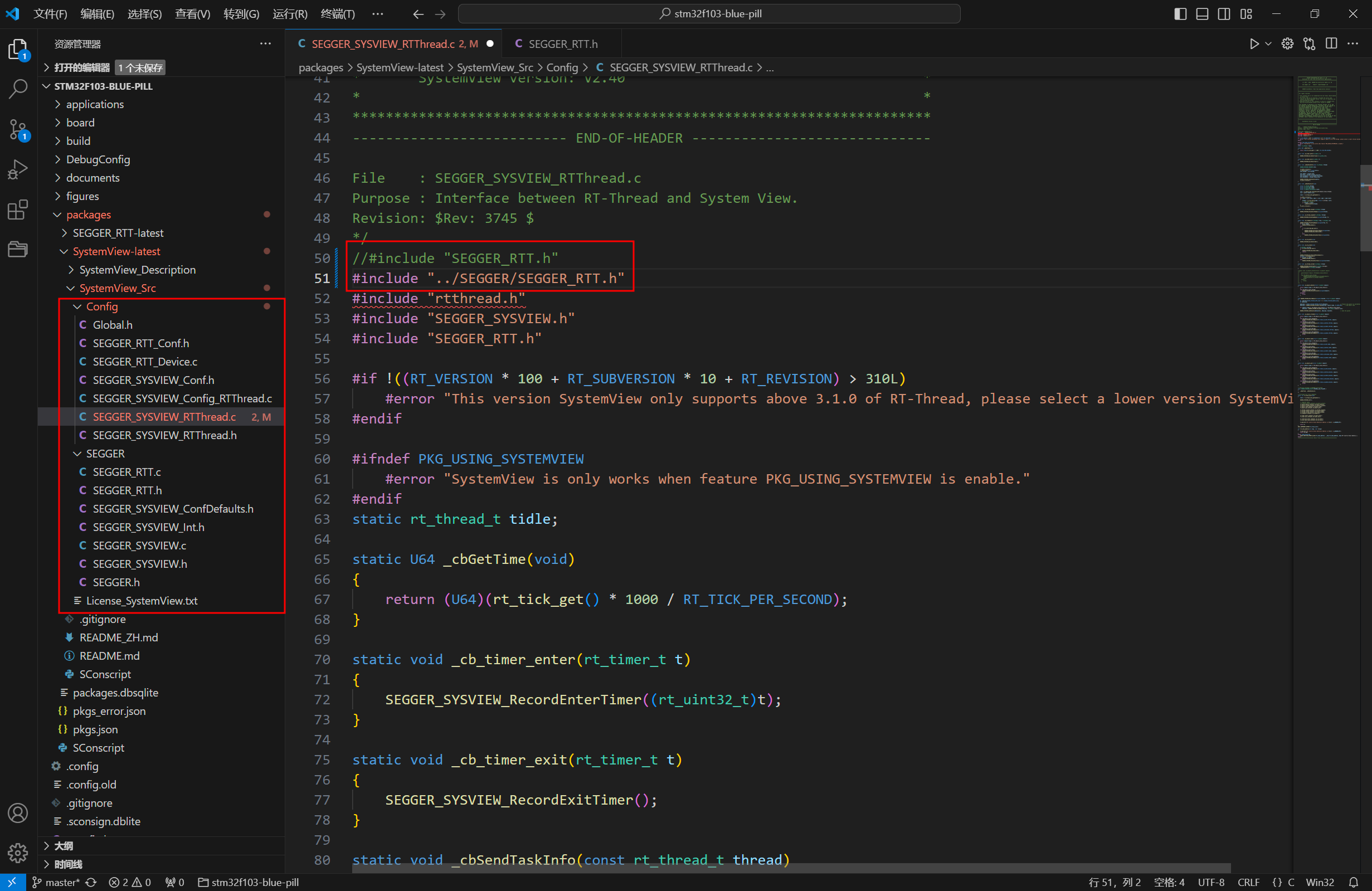
我们发现引用的头文件与当前文件不属于同级目录,这会导致编译器找不到头文件,因此我们只需要更改头文件索引目录即可
我们如果在vscode里面不想看见除了stm32的所有芯片bsp,我们可以在settings.json填写如下代码
{
"files.exclude": {
"**/bsp/^(stm32)/**": true,
"bsp/[!s]*": true,
"bsp/s[!t]*": true,
"bsp/st[!m]*": true,
"bsp/stm[!3]*": true,
"bsp/stm3[!2]*": true,
"bsp/stm32/stm32[!f]*": true,
"bsp/stm32/stm32f[!1]*": true,
"bsp/stm32/stm32f10[!3]*": true,
"bsp/stm32/stm32f103-[!b]*": true,
"bsp/stm32/libraries/STM32[!F]*":true,
"bsp/stm32/libraries/STM32F[!1]*":true,
"bsp/stm32/libraries/templates/stm32[!f]*":true,
"bsp/stm32/libraries/templates/stm32f[!1]*":true,
},
"search.exclude": {
"**/bsp/^(stm32)/**": true,
"bsp/[!s]*": true,
"bsp/s[!t]*": true,
"bsp/st[!m]*": true,
"bsp/stm[!3]*": true,
"bsp/stm3[!2]*": true,
"bsp/stm32/stm32[!f]*": true,
"bsp/stm32/stm32f[!1]*": true,
"bsp/stm32/stm32f10[!3]*": true,
"bsp/stm32/stm32f103-[!b]*": true,
"bsp/stm32/libraries/STM32[!F]*":true,
"bsp/stm32/libraries/STM32F[!1]*":true,
"bsp/stm32/libraries/templates/stm32[!f]*":true,
"bsp/stm32/libraries/templates/stm32f[!1]*":true,
},
}
看起来有点蠢,这是由于vscode目前不支持正则的写法Github的讨论
MobaXterm与msh配置
首先对msh线程进行配置,由于msh是系统默认组件,我们无需使用menuconfig对系统进行裁剪,因此我们只需要对代码进行修改即可
msh会被系统自动执行,但是由于优先级的问题我们应该在main函数做延时处理,防止饿死msh线程
int main(void)
{
//SEGGER_SYSVIEW_Start();
/* set LED0 pin mode to output */
rt_pin_mode(LED0_PIN, PIN_MODE_OUTPUT);
//demo_init();
rt_kprintf("hello world\n");
while (1)
{
rt_thread_mdelay(10);
}
}
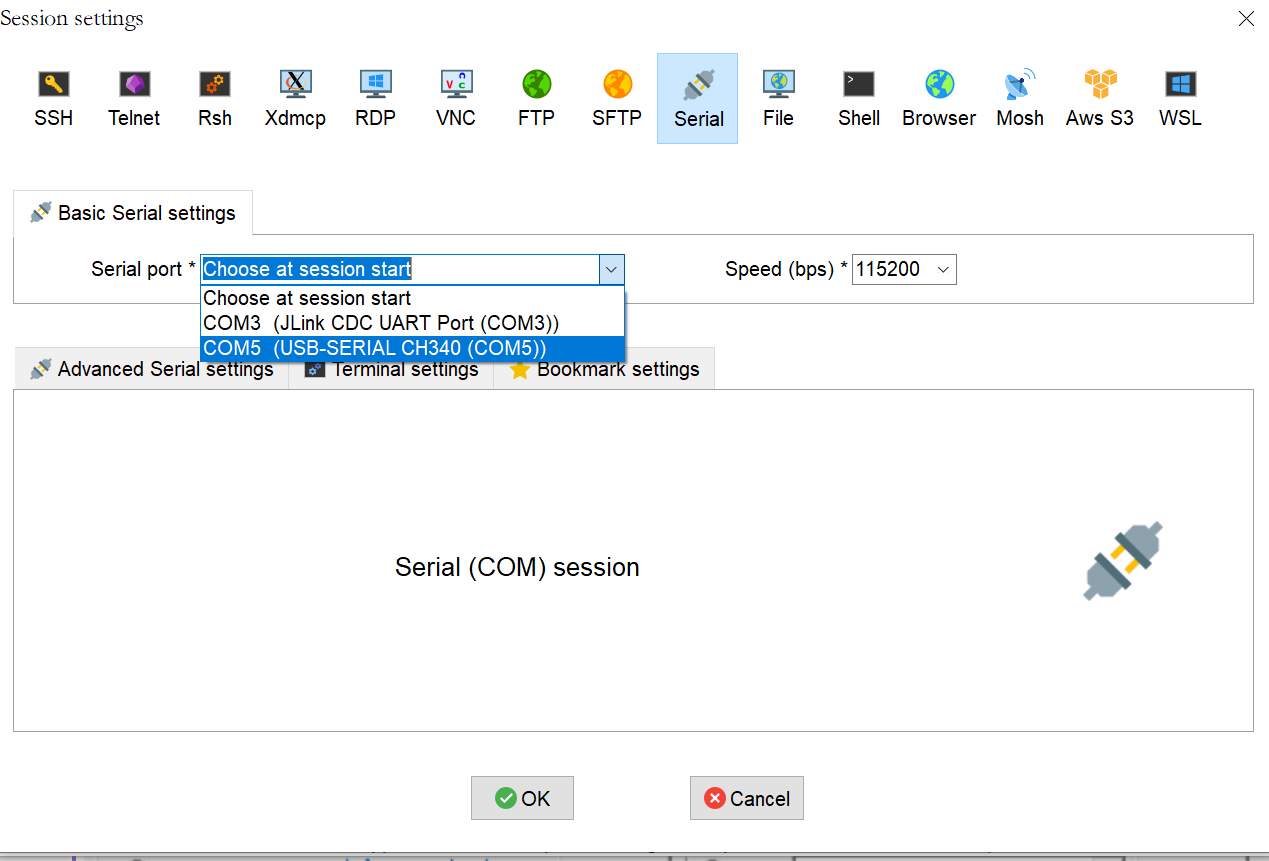
接下来我们配置MobaXterm,我们新建会话,类型选择串口。在端口上面我们可以打开设备管理器查看com号也可以根据提示直接进行选择,波特率选择115200
至此软件部分设置完毕
硬件接线
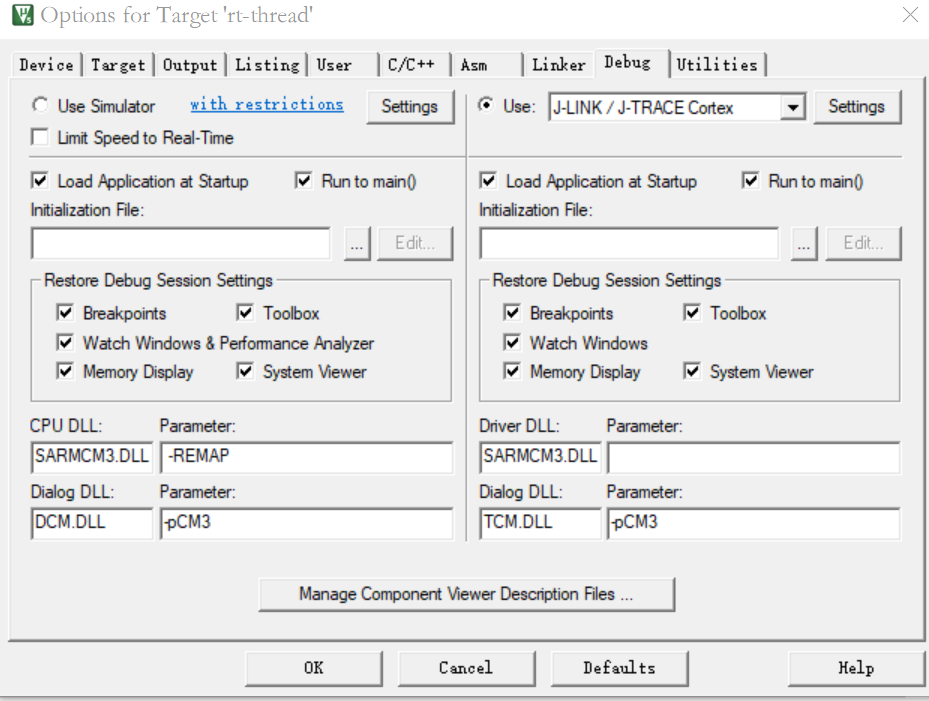
首先将jtag接口连接到转接板上,按照最小系统板的原理图将转接板的3.3v,gnd,nrst,tdi,tdo,tms,tck,vref引脚连接到最小系统板上,其中vref是转接板的参考电压引脚,应该与最小系统板的正极并联。连接完成后我们就可以安装jlink驱动程序并烧写程序进板子了,我们也可以使用keil进行jlink的debug。但之前我们必须设置debug选项:
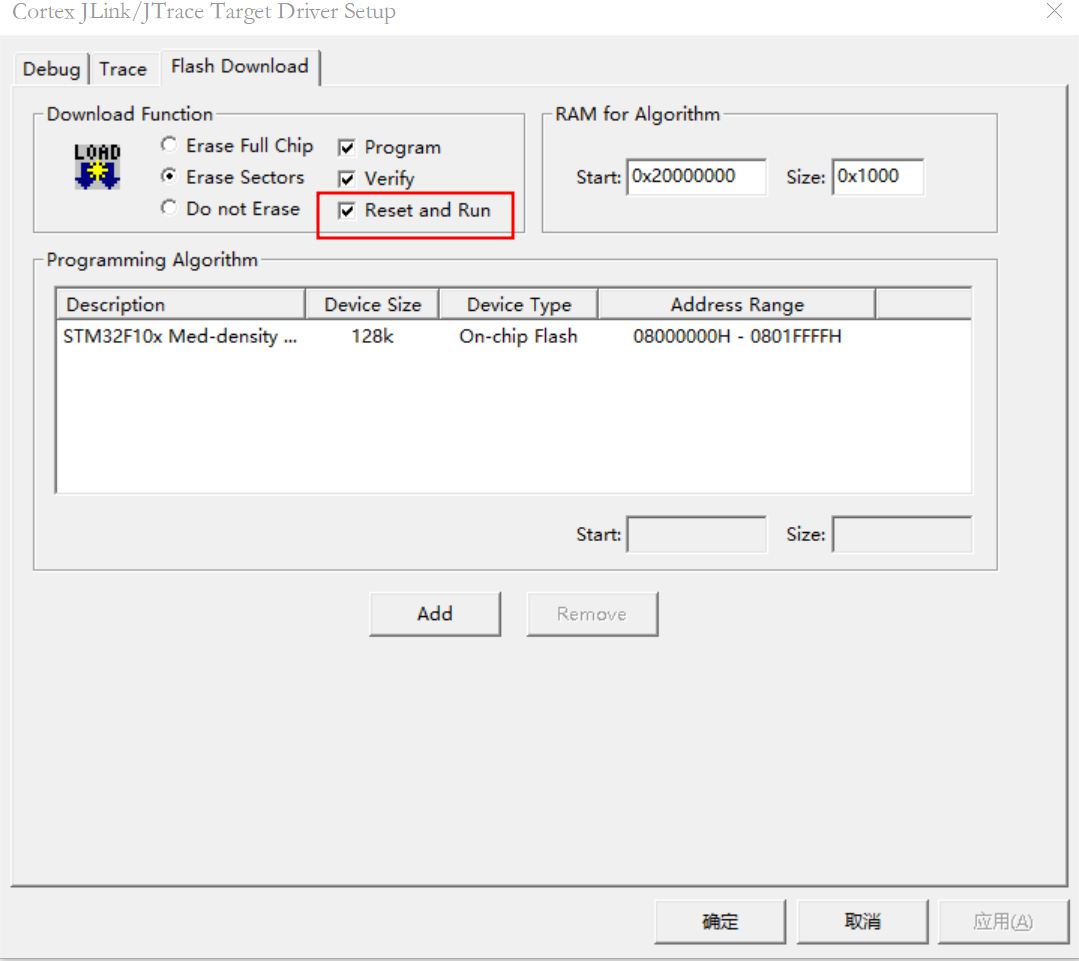
- 首先选择jlink(注意这里的Driver DLL和Dialog DLL选项及其参数,当修改芯片型号时需要进行修改)
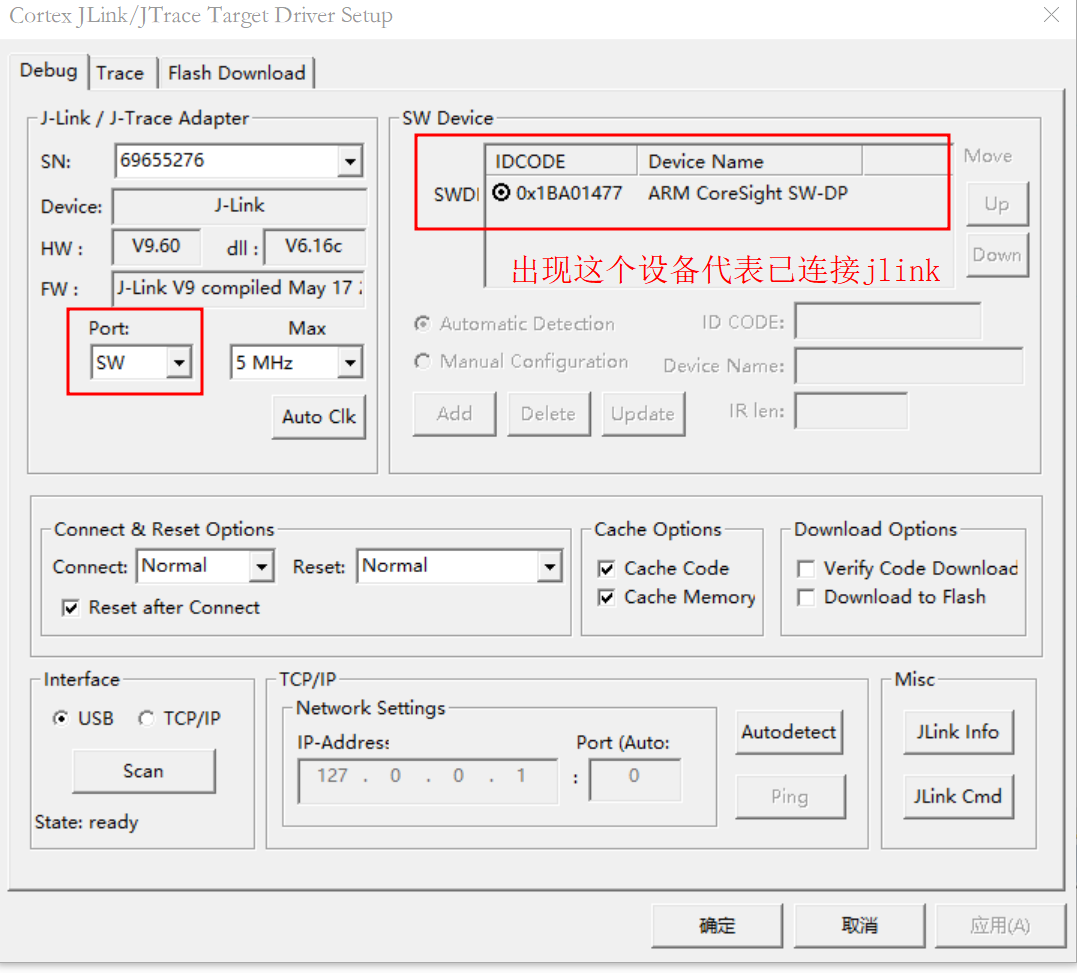
而后选择端口为sw(gpt也不知道为什么不使用jtag调试而使用sw)
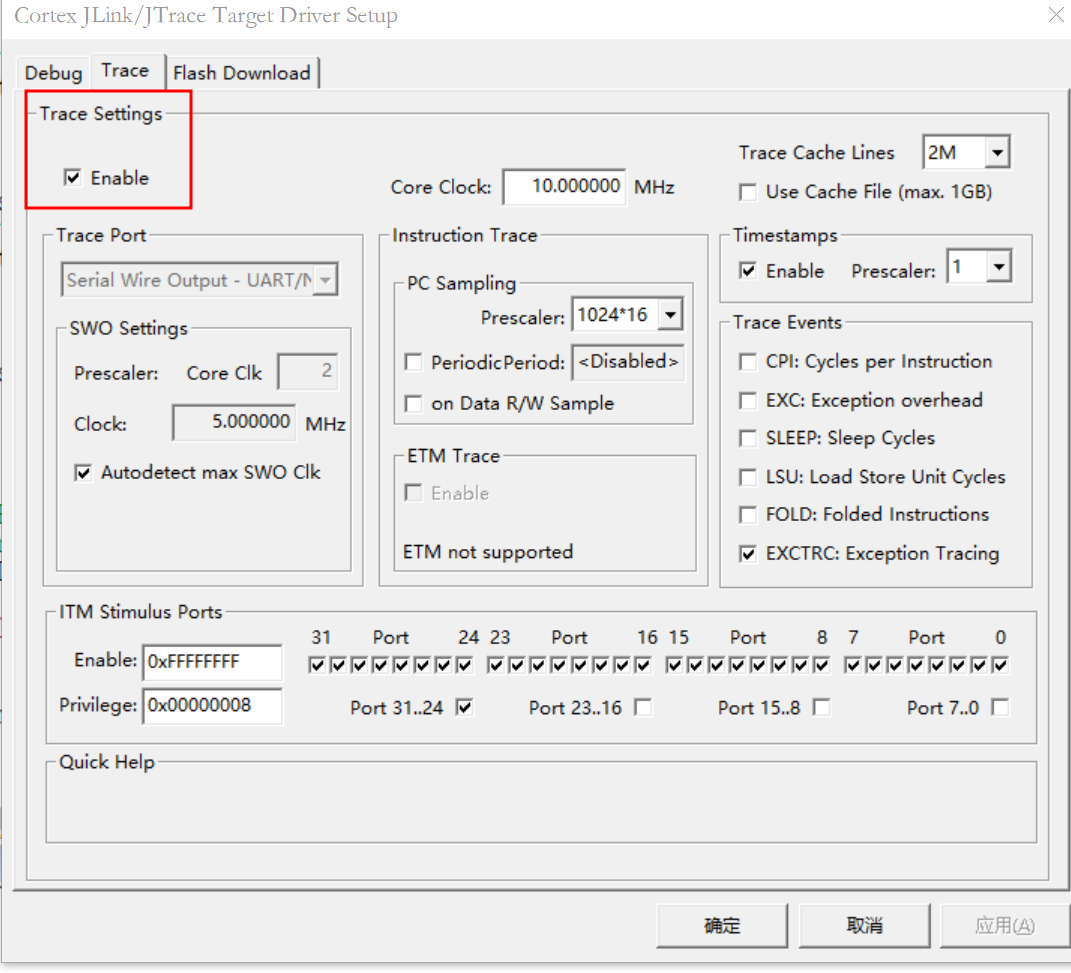
别忘了使能trace
下载运行
这样keil和调试器我们就设置好了,接下来我们设置串口
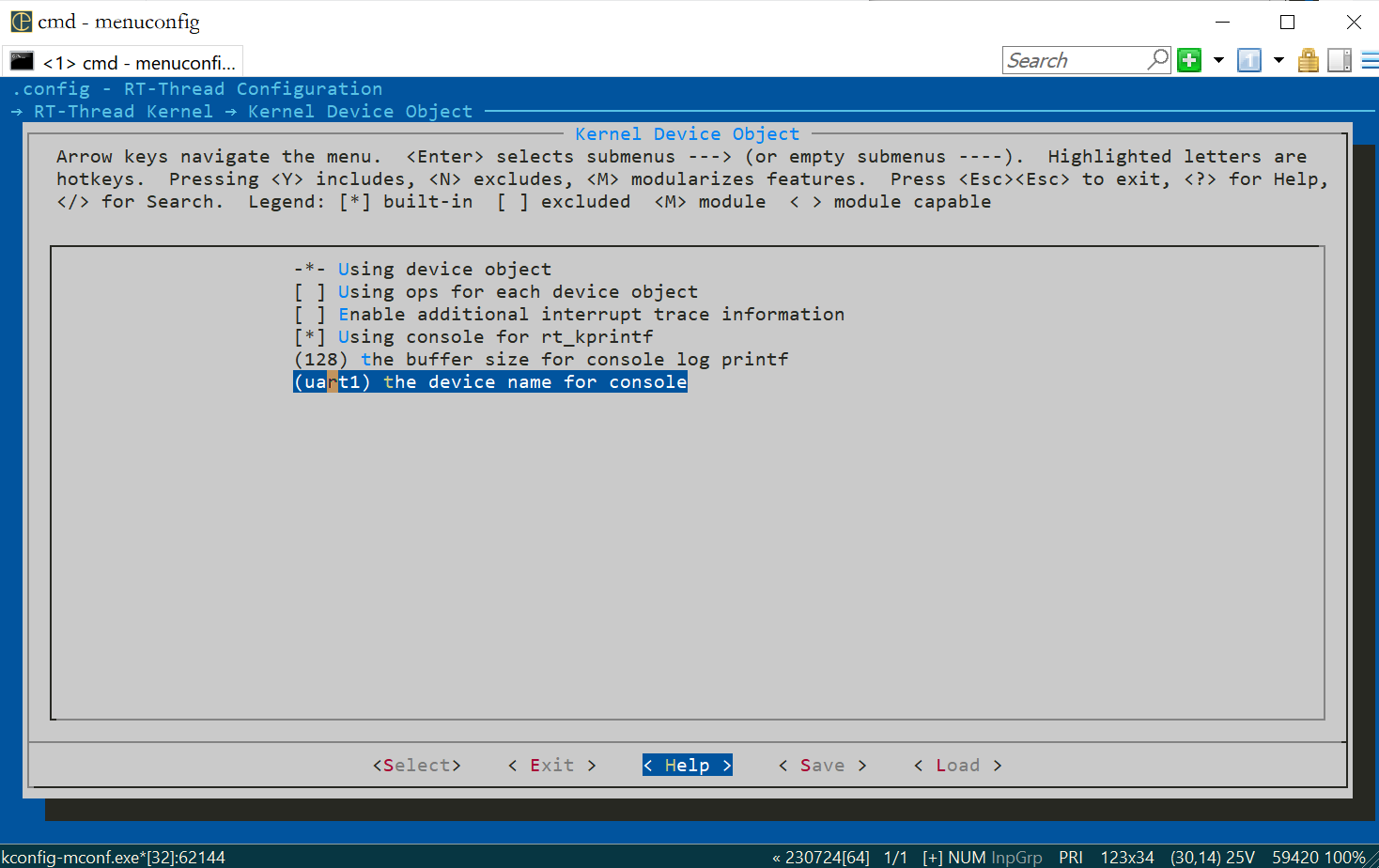
rtt可以通过menuconfig配置对应的串口,具体配置路径如图。rtt默认的串口为uart1,在江科大的板子上对应的是pa9,pa10引脚,因此我们的硬件串口连线应该连接在pa9,pa10上,这样我们才能通过串口使用msh进行调试
实验过程
串口实验
按照串口官方文档编写程序,需要注意我们使用的是串口1,而官方文档为串口2,我们需要修改代码。除此之外,由于官方例程只能输出固定字符串,我们可以在官方文档上进行改进,添加shell-like serial的功能,这个功能可以使我们像shell一样将从串口发送的信息回显到MobaXterm上,下面是改进过程中遇到的问题:
改进后的例程:
#include <rtthread.h>
#define SAMPLE_UART_NAME "uart1" /* 串口设备名称 */
/* 串口接收消息结构*/
struct rx_msg
{
rt_device_t dev;
rt_size_t size;
};
/* 串口设备句柄 */
static rt_device_t serial;
/* 消息队列控制块 */
static struct rt_messagequeue rx_mq;
/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{
struct rx_msg msg;
rt_err_t result;
msg.dev = dev;
msg.size = size;
result = rt_mq_send(&rx_mq, &msg, sizeof(msg));
if ( result == -RT_EFULL)
{
/* 消息队列满 */
rt_kprintf("message queue full!\n");
}
return result;
}
static void serial_thread_entry(void *parameter)
{
struct rx_msg msg;
rt_err_t result;
rt_uint32_t rx_length = 0;
static char rx_buffer[RT_SERIAL_RB_BUFSZ + 1];
char input;
while(1)
{
result = rt_mq_recv(&rx_mq, &msg, sizeof(msg), RT_WAITING_FOREVER);
if(result < 0)
{
rt_kprintf("mq recv err\n");
}
rt_device_read(msg.dev, 0, &input, 1);
rx_buffer[rx_length++] = input;
rt_kprintf("input: %c\n",input);
/* 以回车为缓冲区输出标志 */
if(input == '\r')
{
/* 通过串口设备 serial 输出读取到的消息 */
rt_size_t size = rt_device_write(msg.dev, 0, rx_buffer, sizeof(rx_buffer));
if(size != sizeof(rx_buffer))
{
rt_kprintf("write err\n");
}
/* 打印数据 */
rt_kprintf("rx_buffer: %s\n", rx_buffer);
/* 重置初始量 */
rx_length = 0;
rt_memset((void*)rx_buffer, 0, sizeof(rx_buffer));
}
}
}
static int uart_dma_sample(int argc, char *argv[])
{
rt_err_t ret = RT_EOK;
char uart_name[RT_NAME_MAX];
static char msg_pool[256];
char str[] = "hello RT-Thread!\r\n";
if (argc == 2)
{
rt_strncpy(uart_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX);
}
/* 查找串口设备 */
serial = rt_device_find(uart_name);
if (!serial)
{
rt_kprintf("find %s failed!\n", uart_name);
return RT_ERROR;
}
/* 初始化消息队列 */
rt_mq_init(&rx_mq, "rx_mq",
msg_pool, /* 存放消息的缓冲区 */
sizeof(struct rx_msg), /* 一条消息的最大长度 */
sizeof(msg_pool), /* 存放消息的缓冲区大小 */
RT_IPC_FLAG_FIFO); /* 如果有多个线程等待,按照先来先得到的方法分配消息 */
/* 以 DMA 接收及轮询发送方式打开串口设备 */
rt_device_open(serial, RT_DEVICE_FLAG_DMA_RX);
/* 设置接收回调函数 */
rt_device_set_rx_indicate(serial, uart_input);
/* 发送字符串 */
rt_device_write(serial, 0, str, (sizeof(str) - 1));
/* 创建 serial 线程 */
rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
/* 创建成功则启动线程 */
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
ret = RT_ERROR;
}
return ret;
}
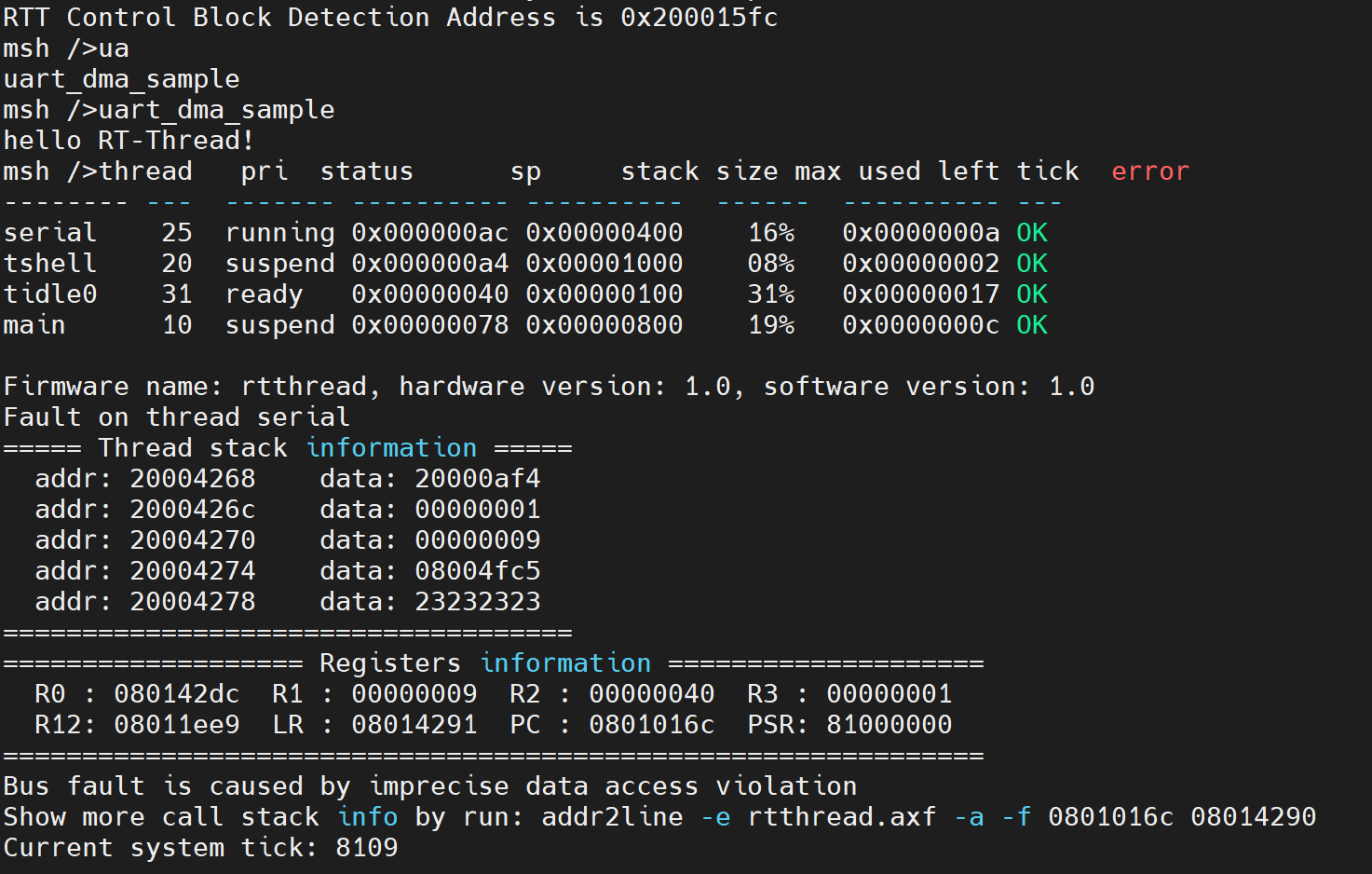
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(uart_dma_sample, uart device dma sample);
为什么必须使用消息队列或者信号量同步???
-
hardfault
-
在serial_thread_entry中定义了rt_uint32_t rx_length = 0;如果仅仅是声明而不初始化:rt_uint32_t rx_length;就会导致编译器不会初始化为0,从而在rx_buffer[rx_length++] = input;处访问非法地址,这对于没有mmu的单片机来说是致命的,最终很可能导致hardfault
-
键盘输入无反应,直至message queue full!错误产生
-
在serial_thread_entry中有while(1)循环,当去掉循环结构而不改变内部代码时会产生这个错误。这是由于即使我们有信号量或消息邮箱,但如果我们没有存活的线程OS也不会将休眠的线程唤醒。解决的办法是使用while(1)死循环用来保活,这样才能正常的被调度器调度和中断唤醒
-
获取信号量失败或其他内核对象失败
-
可能是子函数占据内存太多把父函数爆栈了,需要在父函数申请一个更大的堆栈空间
遇到的问题
如果在rt_uint32_t rx_length = 0;处不对rt_length初始化,则会导致下面printf访问非法的内存地址,这在103上会导致总线错误
spi实验
硬件连线
我们使用w25q64来作为测试spi通信的硬件设备,同时也为搭建文件系统做准备
在这里我们使用103的spi1作为通信接口,因此根据江科大的引脚定义,我们需要将w25q64的各个引脚连接到103的pa4~pa7上
bsp制作
由于rtt官方bsp给出的f103的bullpill板仅支持spi2,为了能够使用spi1接口我们需要修改bsp
- 首先下载安装STM32CubeMX,安装完毕后再下载对应的stm32f1系列的sdk
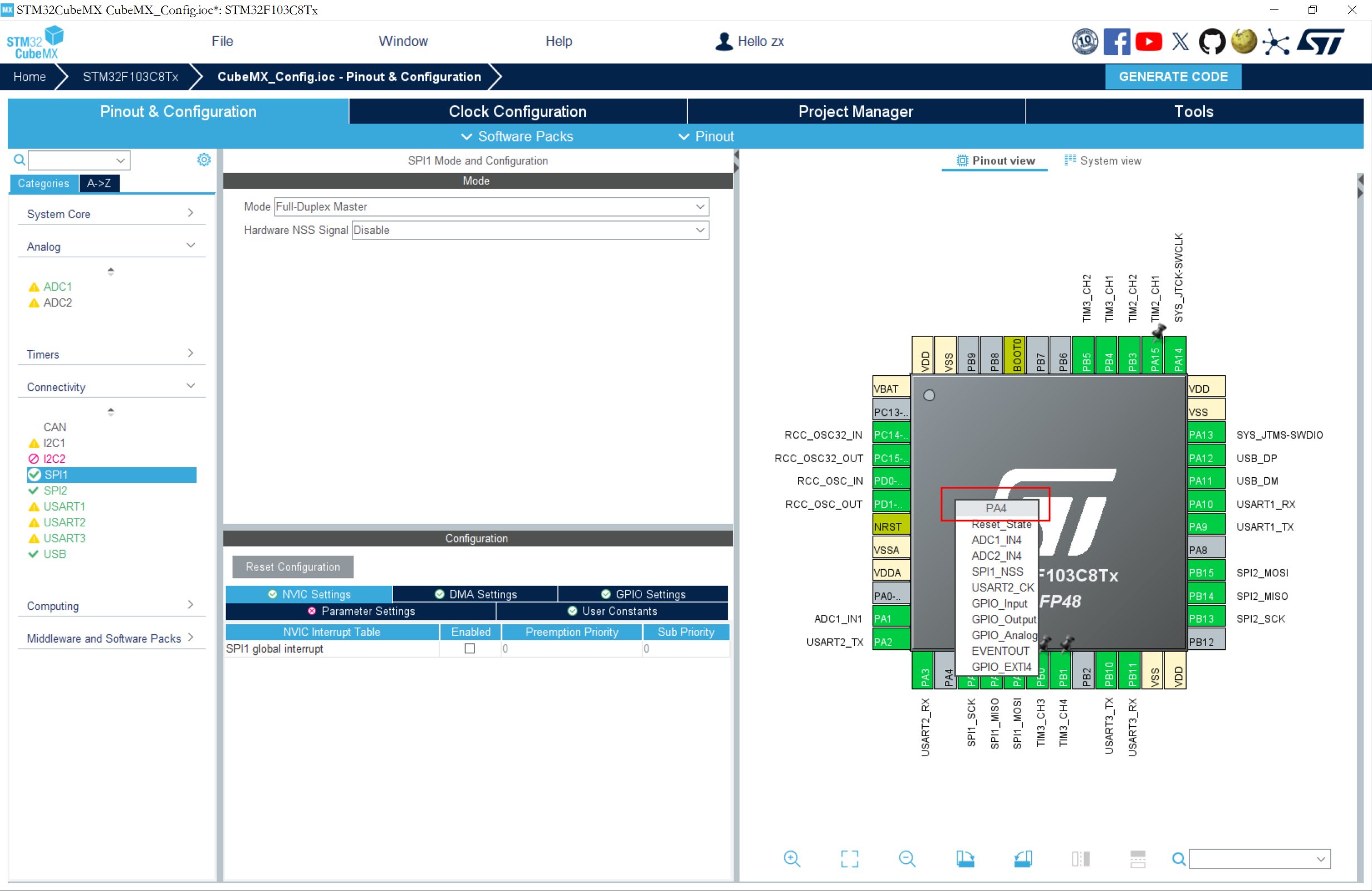
- 然后将stt提供的ioc文件(位于D:\Programes\RT-Thread\rtt\rt-thread\bsp\stm32\stm32f103-blue-pill\board\CubeMX_Config\CubeMX_Config.ioc)打开,并将原来复用为adc的pa4~pa7引脚复用为spi,注意不要将pa4设置为spi_nss,因为rtt会对此引脚进行软件控制,我们不需要复用此引脚
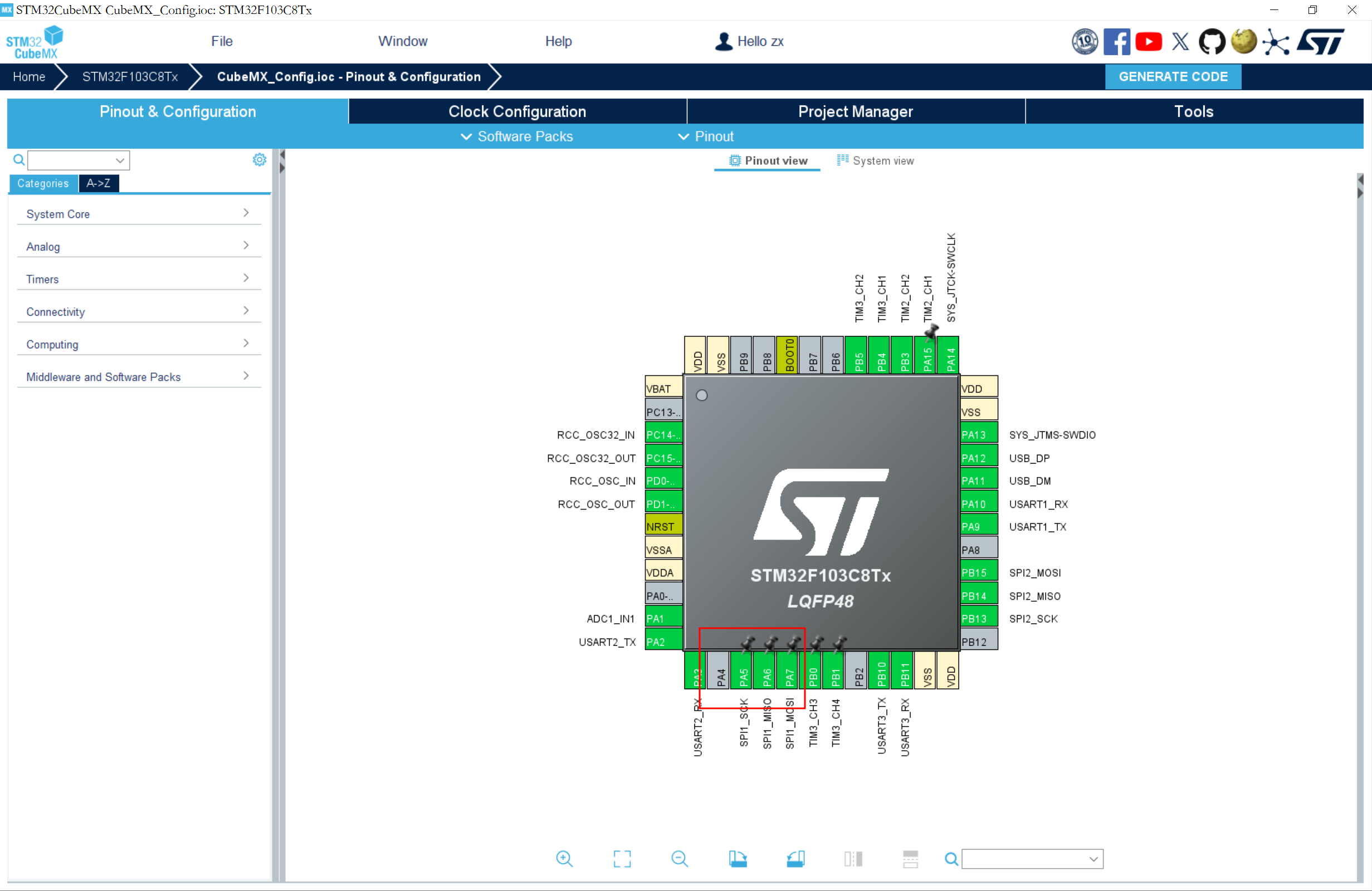
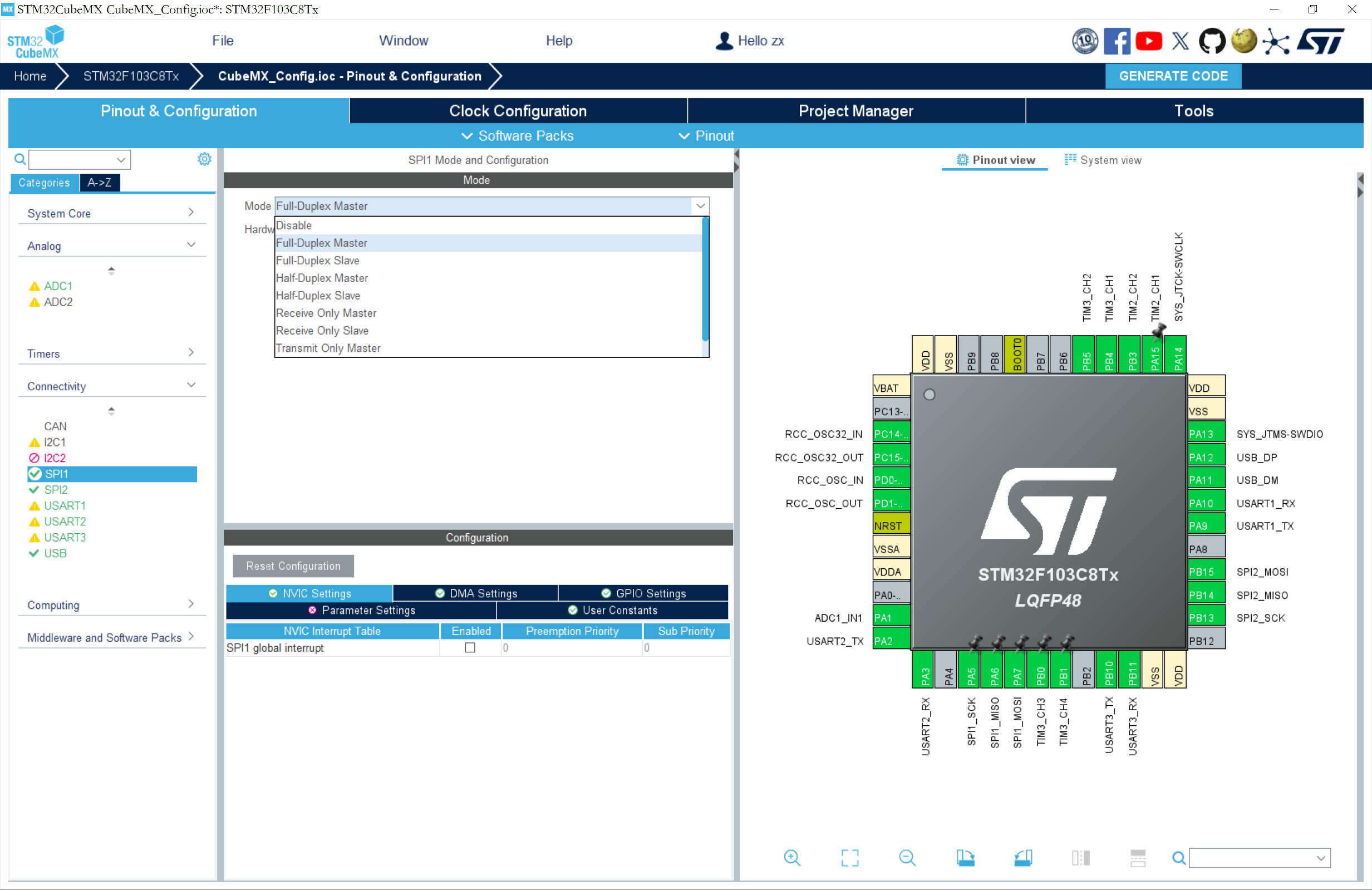
- 然后通过左侧面板选择复用的spi引脚的模式为全双工。因为rtt会对片选引脚进行软件设置,因此在下方的硬件片选引脚选择disable
由于adc1和adc2桥接在不同频率的外设总线上,因此使用预分频的时候adc1选择4,adc2选择2
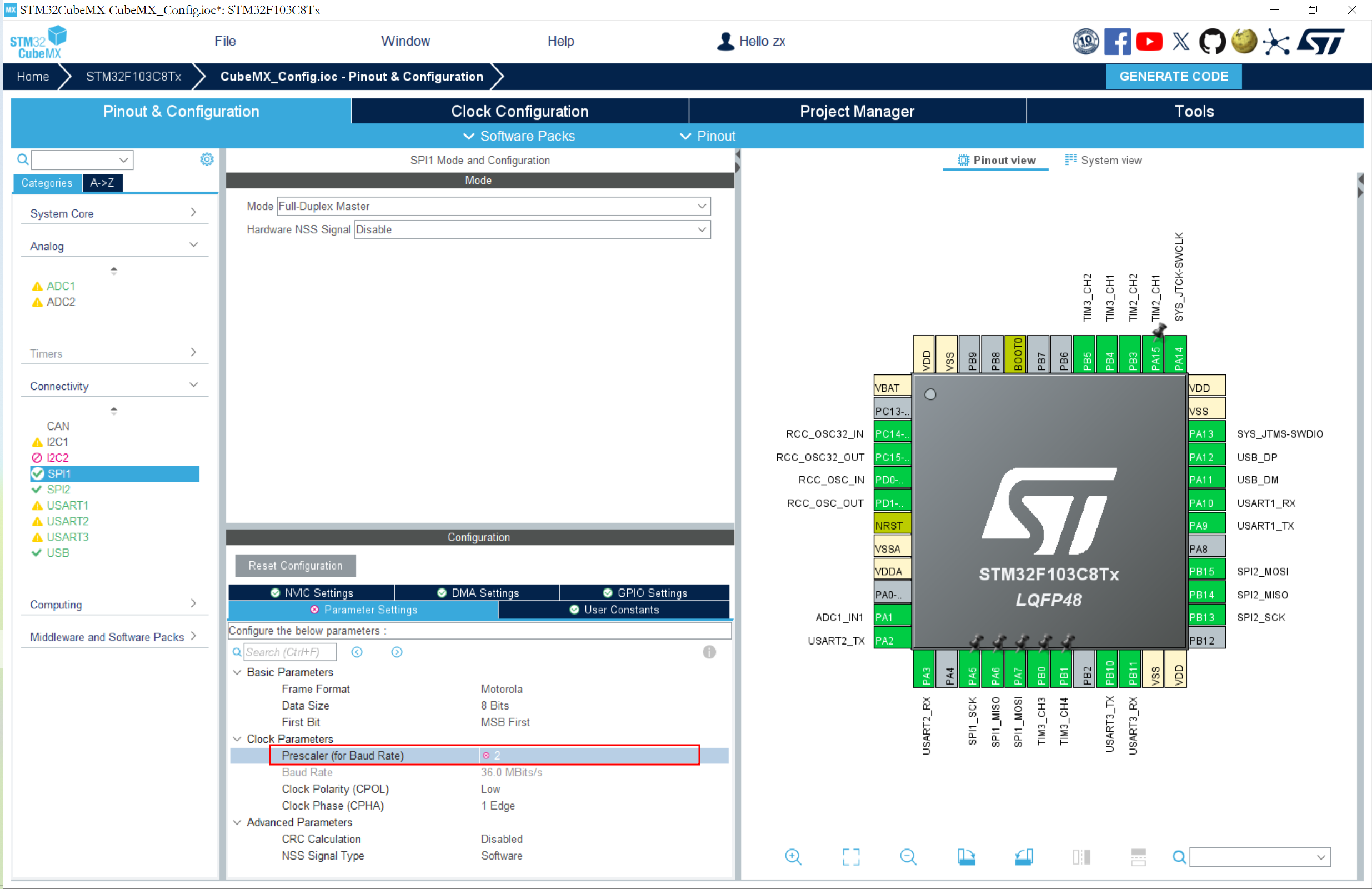
- 我们也可以在当前栏内配置其他选项,当配置完成后点击generate code就可以生成bsp文件了
- 为了能够在menuconfig显示菜单项并修改外设配置 ,我们进入board/Kconfig文件,搜索到spi2后复制一份并将spi2替换为spi1,并修改menu项名称为spi1(我这里没修改就会导致出现两个一样的菜单项)
- 这时我们menuconfig就可以看到新的spi1设备了,使能新设备spi1后进入配置界面,打开dma功能
至此,bsp制作完成,接下来进行menuconfig配置rtt组件
menuconfig配置
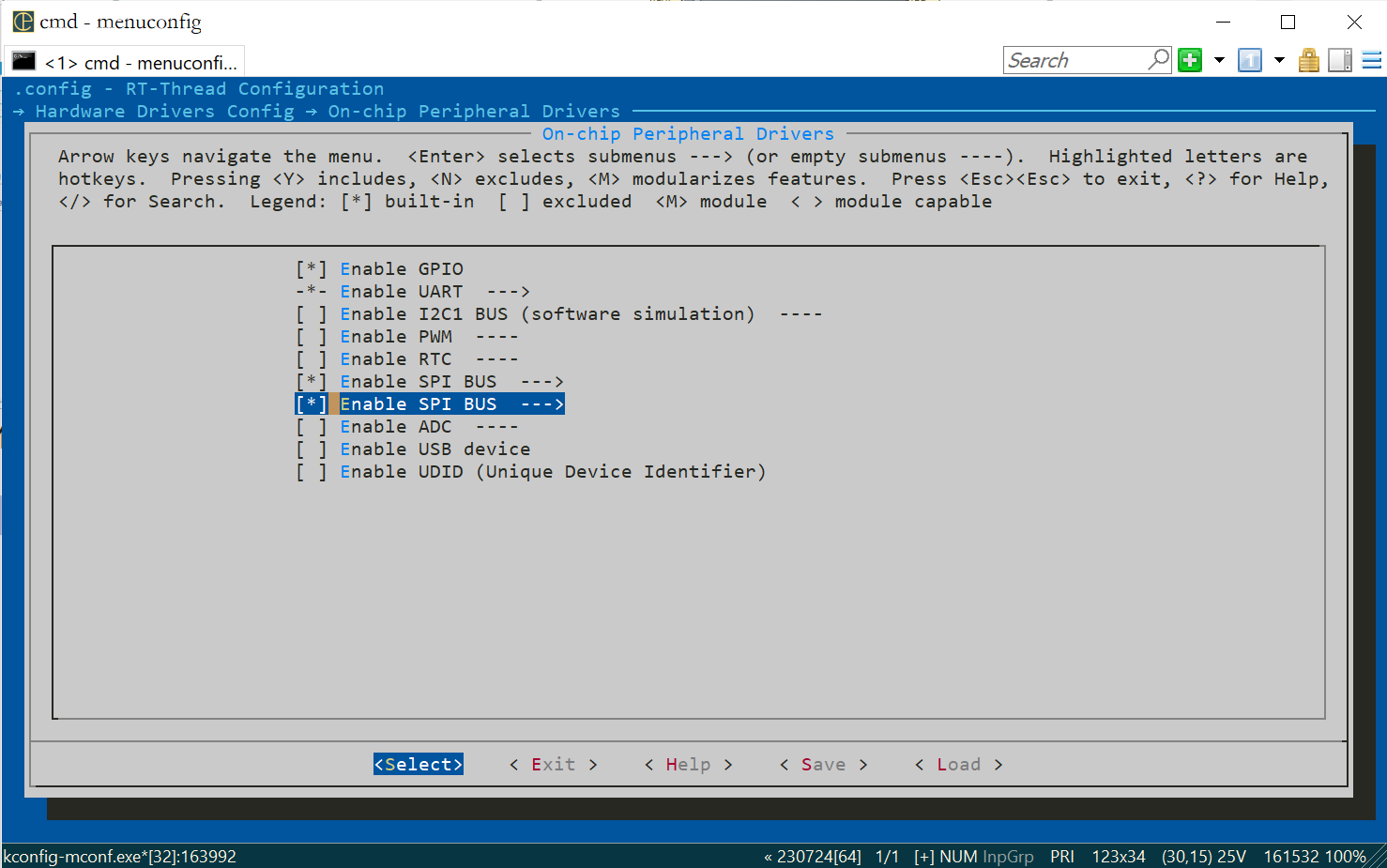
如图所示,在menuconfig中打开spi总线驱动,启用万能 SPI Flash 驱动库serial flash universial driver(sfud)库来为格式化文件系统做准备
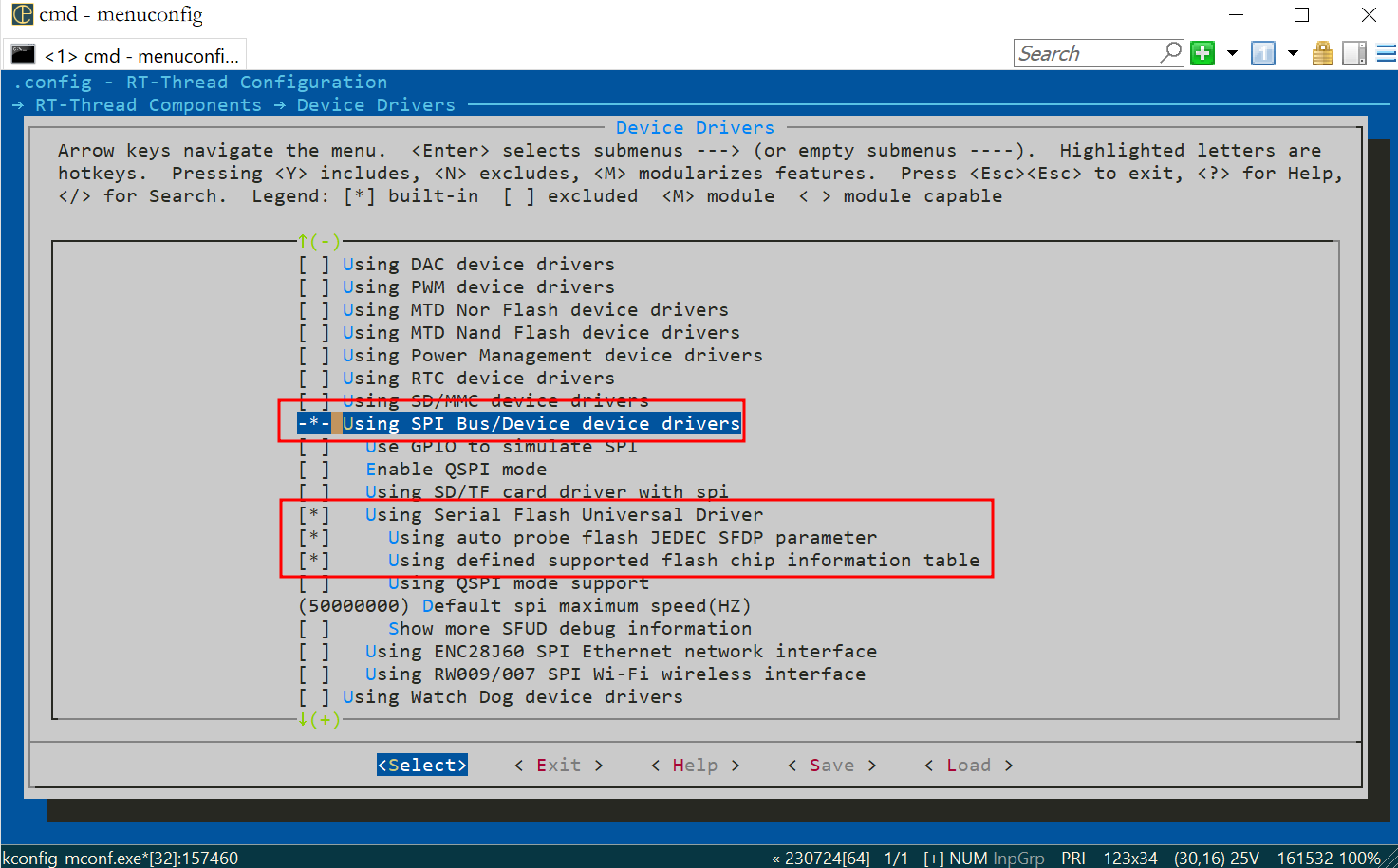
其他选项如qspi模式,gpio模拟spi等是否需要启用根据需求来
配置完成后使用scons命令进行编译(直接使用keil编译也可)
软件编写
下列代码参考官方文档,注意修改参考代码中的spi设备号和总线号
static void spi_w25q_sample(int argc, char *argv[])
{
struct rt_spi_device *spi_dev_w25q;
char name[RT_NAME_MAX];
rt_uint8_t w25x_read_id = 0x90;
rt_uint8_t id[5] = {0};
if (argc == 2)
{
rt_strncpy(name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(name, W25Q_SPI_DEVICE_NAME, RT_NAME_MAX);
}
struct rt_spi_device *spi_device = RT_NULL;
spi_device = (struct rt_spi_device *)rt_malloc(sizeof(struct rt_spi_device));
if(RT_NULL == spi_device)
{
LOG_E("Failed to malloc the spi device.");
}
/* 查找 spi 设备获取设备句柄 */
spi_dev_w25q = (struct rt_spi_device *)rt_device_find(name);
if (!spi_dev_w25q)
{
rt_kprintf("spi sample run failed! can't find %s device!\n", name);
}
else
{
/* 方式1:使用 rt_spi_send_then_recv()发送命令读取ID */
rt_spi_send_then_recv(spi_dev_w25q, &w25x_read_id, 1, id, 5);
rt_kprintf("use rt_spi_send_then_recv() read w25q ID is:%x%x\n", id[0], id[1]);
/* 方式2:使用 rt_spi_transfer_message()发送命令读取ID */
struct rt_spi_message msg1, msg2;
msg1.send_buf = &w25x_read_id;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = RT_NULL;
msg2.recv_buf = id;
msg2.length = 5;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_w25q, &msg1);
rt_kprintf("use rt_spi_transfer_message() read w25q ID is:%x%x\n", id[3], id[4]);
}
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(spi_w25q_sample, spi w25q sample);
这里第一步应该是将spi设备绑定到spi总线上,但为了能够快速进行硬件初始化,这里将绑定代码放到主函数中
rt_err_t err;
err = rt_hw_spi_device_attach("spi1", "spi10", GPIOA, GPIO_PIN_4);
if(err != RT_EOK)
{
LOG_E("Failed to attach the spi device.");
}
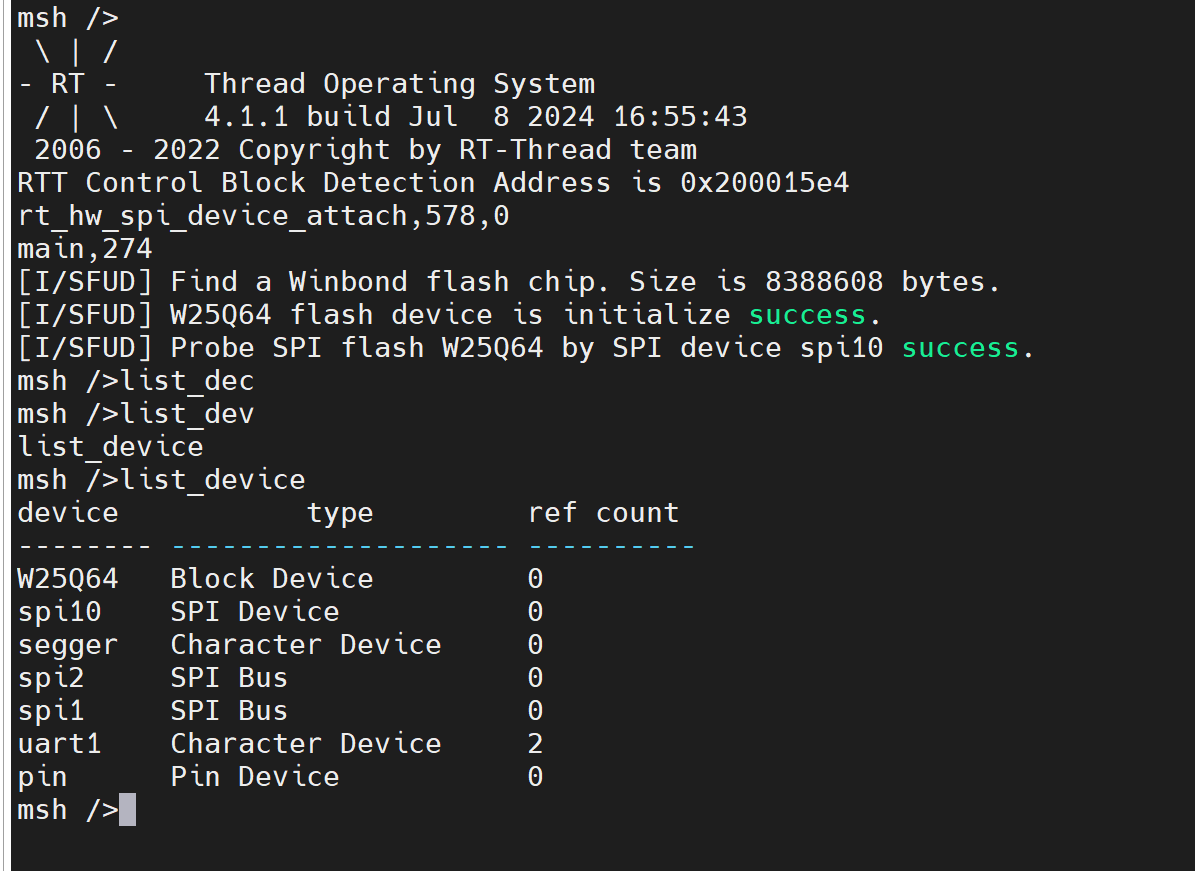
由于我已经打开了文件系统,这可能会对读写程序有影响,因此读到的数据是0,但是可以看到,系统已经识别了spi1,spi2两条总线,并且还探测到了spi10设备

遇到的问题
- spi找不到设备但能正常识别总线/assert failed at rt_hw_spi_device_attach错误
- 可能是设备绑定函数使用错误,使用
rt_spi_bus_attach_deviceapi和rt_hw_spi_device_attachapi是不同的。两者形式如下
rt_err_t rt_hw_spi_device_attach(const char *bus_name,
const char *device_name,
GPIO_TypeDef* cs_gpiox,
uint16_t cs_gpio_pin);
rt_err_t rt_spi_bus_attach_device(struct rt_spi_device *device,
const char *name,
const char *bus_name,
void *user_data)
注意那个void *user_data,这个是用来传struct stm32_hw_spi_cs结构体的。这个结构体包含了端口组号(如GPIOA,GPIOB)和端口号(GPIO_PIN_4,GPIO_PIN_5等),所以下面的api实际就是上面改进。对于rtt v5+来说,推荐使用rt_spi_bus_attach_device_cspin,这个api是对下面的api的进一步改进,它使用RT-Thread的PIN框架来绑定SPI的片选引脚,解决了不同bsp的上层应用对片选引脚操作不统一的问题
文件系统实验
对于stm32f103c8t6而言,使用文件系统会导致内存不足,这是因为rtt会malloc一个FATFS对象,这个操作会申请一个4k左右大小的空间,而这对于20k sram的103而言是捉襟见肘的。因此下文考虑使用f407vet6来代替
spi实验完成后f103就可以与w25q64芯片进行通讯了,为了能够创建块设备,我们还需要在代码中加入如下代码
static int rt_hw_spi_flash_with_sfud_init(void)
{
if (RT_NULL == rt_sfud_flash_probe("W25Q64", "spi10"))
{
return RT_ERROR;
};
return RT_EOK;
}
INIT_COMPONENT_EXPORT(rt_hw_spi_flash_with_sfud_init)
最后一行表示将函数导出为组件,其内部实现是将代码放进rtt规定的段内在系统开机初始化的时候调用,详解见CSDN。因此如果block_device的启动位于spi驱动之前就会导致不能创建块设备,对于这种情况我们有两种解决办法:
- 要么根据官方文档-启动流程将主函数中的
rt_hw_spi_device_attach函数使用INIT_DEVICE_EXPORT()宏导出,这样可以将spi设备启动顺序提前 - 要么在主函数中手动调用
rt_hw_spi_flash_with_sfud_init函数,这样可以将块设备启动顺序滞后
这样我们就可以看到块设备了
CmBacktrace移植
在前面的实验中我们发现了在实验过程中会造成很对问题,对于这些问题排查起来有的会很麻烦,例如hardfault。当程序问题产生的时候,最重要的就是定位问题,对于这种情况我们通常的解决办法是使用keil的单步调试一步步看,有经验的工程师还会使用反编译的文件+寄存器现场来定位问题。但上面两种办法效率太低,因此我们推荐使用CmBacktrace工具来定位问题。
CmBacktrace的原理就是栈回溯,所以这跟有经验的工程师用的方法没有本质区别
组件移植过程非常简单,我们只需要进入 RT-Thread online packages -> tools packages,使能CmBacktrace套件并配置相关项即可。注意退出时不要忘记pkgs --update
遇到的问题
- 编译阶段找不到CmBacktrace的头文件,如果包含CmBacktrace的头文件就会导致CmBacktrace头文件的内容与之前已经包含头文件的内容产生冲突
- 造成这个原因的是keil工程并没有包含所需的头文件 ,因此我们需要在工程里给定头文件的路径